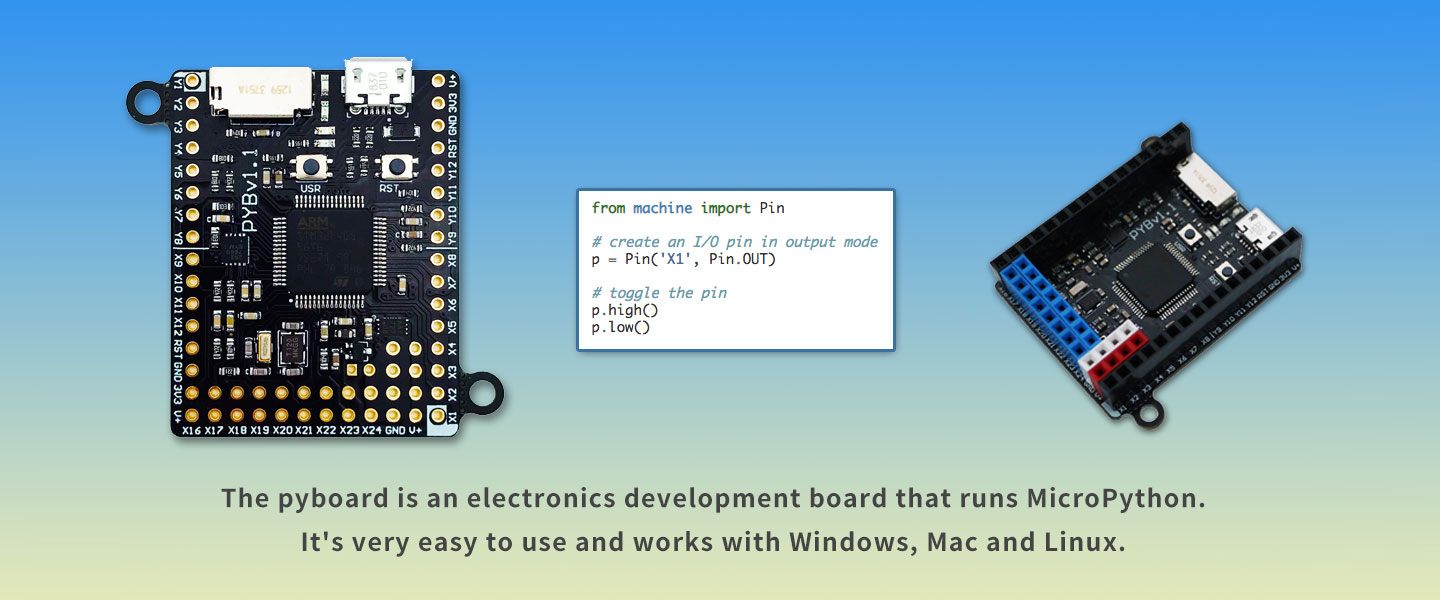
The pyboard is a compact and powerful electronics development board that runs MicroPython. It connects to your PC over USB, giving you a USB flash drive to save your Python scripts, and a serial Python prompt (a REPL) for instant programming. Requires a micro USB cable. Works with Windows, Mac and Linux.
MicroPython is a complete re-write of the Python (version 3.4) programming language so that it fits and runs on a microcontroller. It includes many optimisations so that it runs efficiently and uses very little RAM.
MicroPython runs bare-metal on the pyboard, and essentially gives you a Python operating system. The built-in pyb module contains functions and classes to control the peripherals available on the board, such as UART, I2C, SPI, ADC and DAC. Watch this video for an overview of the pyboard.
There are 3 main ways to control the pyboard:
- REPL: Connecting to your PC via USB, the board appears as a USB virtual comms port (CDC VCP) and you can use any serial program to connect and get a Python REPL prompt. This allows you to instantly type and execute Python commands, just like you would when running Python on your PC. You can also redirect the REPL to any of the UARTs on the pyboard.
- Remote script: You can change from REPL to raw REPL mode by sending ctrl-A, and then in raw REPL mode you can send an arbitrary Python script to the board for it to execute immediately. A Python script is available which makes using this mode very simple: you just run
python pyboard.py script_to_run.pyand this will executescript_to_run.pyon the pyboard, returning any output. - From file: The pyboard has a small, built-in filesystem which lives in part of the flash memory of the microcontroller. It also has an SD card slot if you want to extend the available storage. When you connect the pyboard to your PC, it appears as a USB flash storage device and you can access (mount) the internal filesystem and the SD card this way. If you copy a Python script to the filesystem and call it
main.pythen the board will execute this script when it starts up. This way you can run scripts without being connected to a PC.
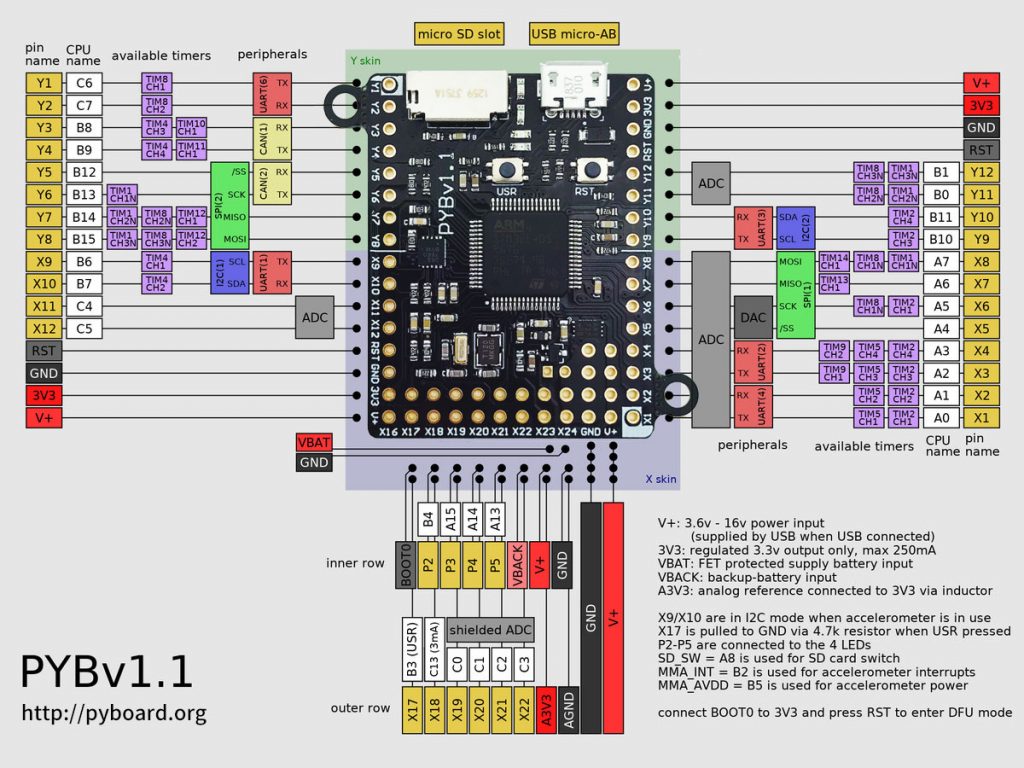
Main features of the hardware:
- STM32F405RG microcontroller
- 168 MHz Cortex M4 CPU with hardware floating point
- 1024KiB flash ROM and 192KiB RAM
- Micro USB connector for power and serial communication
- Micro SD card slot, supporting standard and high capacity SD cards
- 3-axis accelerometer (MMA7660)
- Real time clock with optional battery backup
- 24 GPIO on left and right edges and 5 GPIO on bottom row, plus LED and switch GPIO available on bottom row
- 3x 12-bit analog to digital converters, available on 16 pins, 4 with analog ground shielding
- 2x 12-bit digital to analog (DAC) converters, available on pins X5 and X6
- 4 LEDs (red, green, yellow and blue)
- 1 reset and 1 user switch
- On-board 3.3V LDO voltage regulator, capable of supplying up to 250mA, input voltage range 3.6V to 16V
- DFU bootloader in ROM for easy upgrading of firmware
This product is built on top of MicroPython PYB v1.1.
Firmware for the pyboard
The builds of the code (the stmhal/ directory) are available below. The hardware version of the board that you have should be written on your pyboard; eg boards with PYBv1.1 written on them should use pybv11_xxx.dfu files.
For each board there are various firmwares available with different options compiled in. The “standard” build is listed first and is the default firmware that the pyboards are shipped with. Use this firmware if you are uncertain. The “double FP” builds use double-precision floating point instead of the standard single precision. The “threading” builds contain the _thread module and allow multithreading. The “network” builds have network drivers for CC3000 and WIZ820io included. All these different firmware are completely interchangeable and you can freely change from one to the other without losing the filesystem on your pyboard.For each firmware group there are various versions of the software available. The latest version is listed first in the line, followed by older, and possibly more stable, versions. A overview of changes for each software version can be found here.
One you have downloaded the appropriate DFU file it can be flashed directly to your pyboard using a DFU programmer. For information about DFU programming on Windows see this PDF. For Linux and Mac see here.
Firmware suitable for PYBv1.1 boards:
- standard: v1.10-23-g1fa8f977f (latest) ; v1.10 ; v1.9.4 ; v1.9.3 ; v1.9.2 ; v1.9.1 ; v1.9 ; v1.8.7 ;
- double FP: v1.10-23-g1fa8f977f (latest) ; v1.10 ; v1.9.4 ; v1.9.3 ; v1.9.2 ;
- threading: v1.10-23-g1fa8f977f (latest) ; v1.10 ; v1.9.4 ; v1.9.3 ; v1.9.2 ;
- double FP + threading: v1.10-23-g1fa8f977f (latest) ; v1.10 ; v1.9.4 ; v1.9.3 ; v1.9.2 ;
- network: v1.10-23-g1fa8f977f (latest) ; v1.10 ; v1.9.4 ; v1.9.3 ; v1.9.2 ; v1.9.1 ; v1.9 ; v1.8.7 ;